

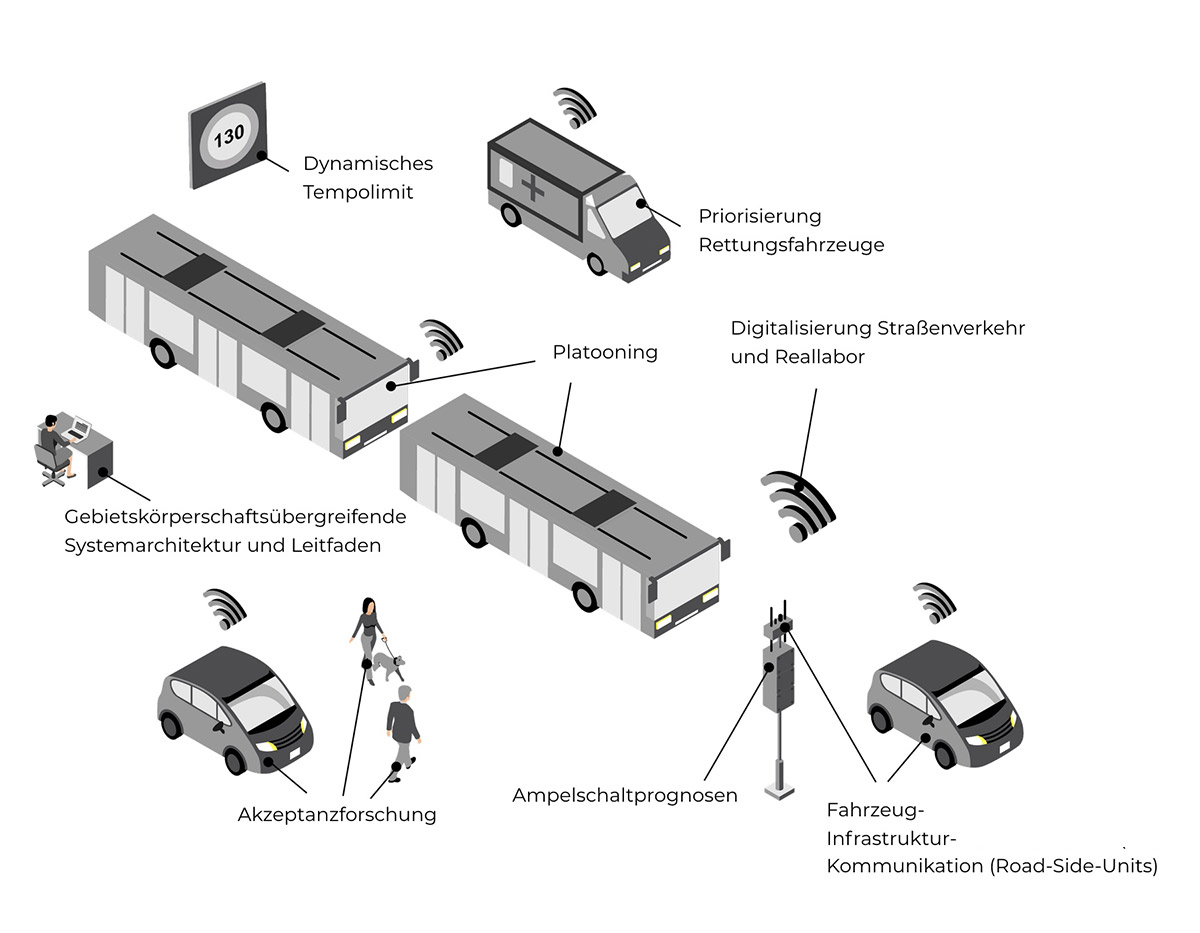
In folgendem Schaubild sind unterschiedliche Themen und Anwendungsfälle von TEMPUS dargestellt. Lernen Sie auf dieser Seite außerdem unsere Projektziele, Meilensteine und Vision kennen.
Ziele & Vision TEST

Projektziele

Digitalisierung Straßenverkehr und Reallabor
Die Verwirklichung von automatisiertem Fahren ist eng an die Digitalisierung der Straßeninfrastruktur und deren Vernetzung gekoppelt. Ein Hauptziel von TEMPUS ist, automatisierte und vernetzte Fahrfunktionen sowohl des Individualverkehrs als auch des öffentlichen Personennahverkehrs im realen Verkehrsgeschehen zu erproben. Im Norden von München wird ein gebietskörperschaftsübergreifendes Testfeld definiert und mit kommunizierender Straßenverkehrstechnik ausgestattet. Damit wollen wir innovative Technologien unter realen Bedingungen testen und Erkenntnisse zur Lösung technischer Herausforderungen gewinnen. Darüber hinaus bietet das Testfeld einen frühen Einblick für Bürger*innen in die fortschreitende Entwicklung des automatisierten und vernetzten Fahrens (AVF).

Fahrzeug-Infrastruktur-Kommunikation
Im Testfeld installieren wir an rund 65 Ampeln Funkmodule (Road-Side-Units, RSUs), die mit den Testfahrzeugen kommunizieren und bestimmte Lichtsignalanlagen- und Kreuzungsinformationen austauschen. Dadurch wird die komplexe Situation einer Kreuzung für das automatisierte Fahrzeug verständlich und eine sichere Fahrt über den Knotenpunkt ermöglicht. In unserem Testfeld wird, im Gegensatz zu vielen anderen Projekten, sowohl die WLAN-basierte ITSG5- als auch die mobilfunkbasierte CV2X- Kurzstrecken-Kommunikationstechnologie getestet. Die ermöglicht uns eine Vielzahl von Anwendungsfällen und bereitet uns bestmöglich auf zukünftige Entwicklungen vor.
Sie sehen gerade einen Platzhalterinhalt von YouTube. Um auf den eigentlichen Inhalt zuzugreifen, klicken Sie auf die Schaltfläche unten. Bitte beachten Sie, dass dabei Daten an Drittanbieter weitergegeben werden.
Mehr InformationenSie sehen gerade einen Platzhalterinhalt von YouTube. Um auf den eigentlichen Inhalt zuzugreifen, klicken Sie auf die Schaltfläche unten. Bitte beachten Sie, dass dabei Daten an Drittanbieter weitergegeben werden.
Mehr Informationen
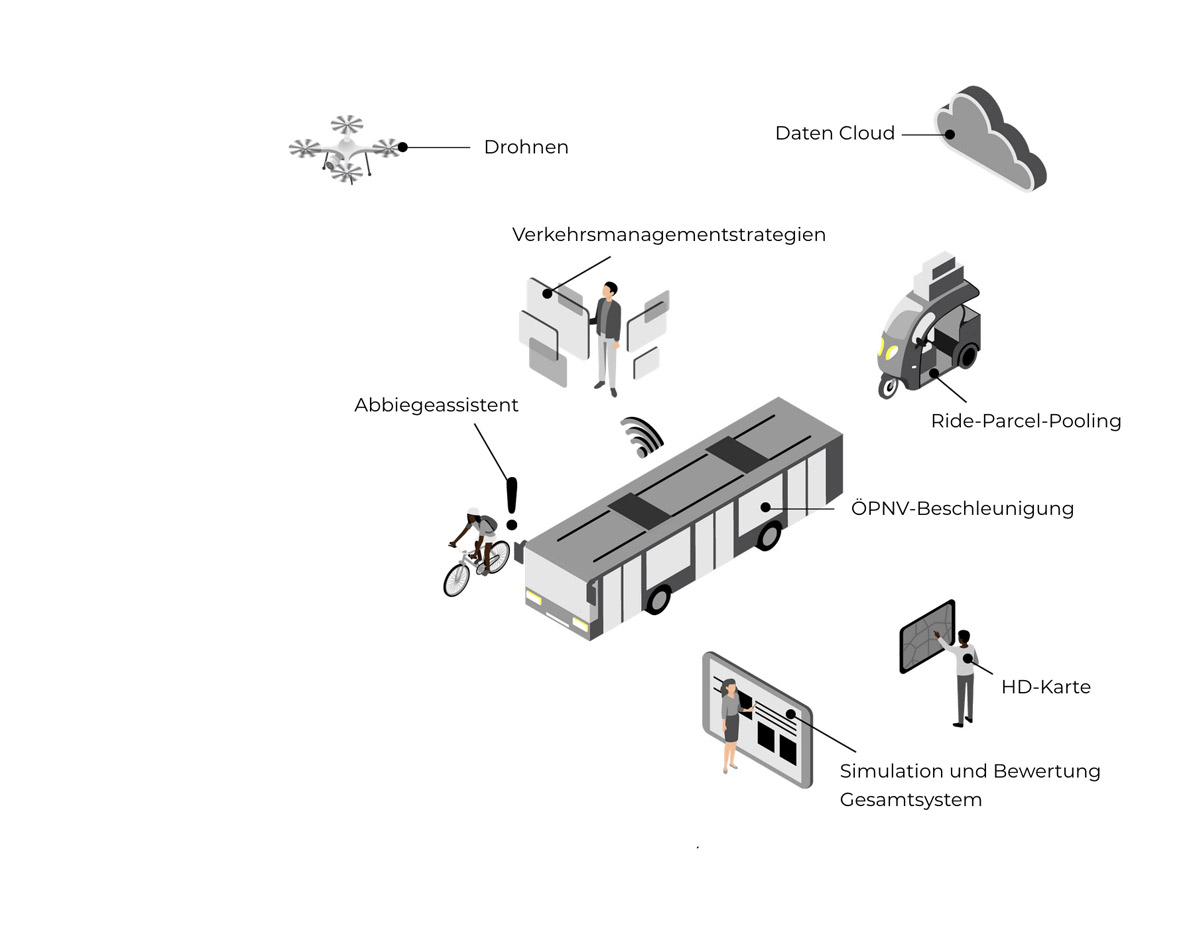
Abbiegeassistent
Für den Abbiegeassistenten wird ein Kreuzungsbereich mit spezieller Kamerasensorik ausgestattet, welche über ein Funkmodul (RSU) mit Fahrzeugen kommunizieren kann. Im Falle der Detektion einer kreuzenden vulnerablen Verkehrsteilnehmer*in wird eine Warnmeldung ausgegeben, auf die die Fahrer*in frühzeitig reagieren kann.
Der Assistent wird an der Kreuzung Allacher Str./ Wintrichring angebracht und auf seine Zuverlässigkeit und Anwendbarkeit am Beispiel von ÖPNV-Bussen getestet. Die Bilddaten, welche die Kameras aufnehmen, werden in anonymisierte Objektdaten, bestehend aus Position, Geschwindigkeit, Richtung und Typ, umgewandelt. Dadurch werden keine personenbezogenen Daten ausgewertet, der Datenschutz wird gewährleistet.
Sie sehen gerade einen Platzhalterinhalt von YouTube. Um auf den eigentlichen Inhalt zuzugreifen, klicken Sie auf die Schaltfläche unten. Bitte beachten Sie, dass dabei Daten an Drittanbieter weitergegeben werden.
Mehr Informationen
Digitalisierung ÖPNV-Beschleunigung
Im städtischen Testfeld wird an drei Kreuzungen die digitale ÖPNV-Beschleunigung, das heißt die Priorisierung von Linienbussen, herstellerübergreifend am Beispiel der Linien 178 und 180 erprobt. Dazu werden spezielle Funkmodule installiert, die nicht nur Informationen aussenden, sondern auch von Fahrzeugen empfangen, verarbeiten und darauf reagieren können (RSUs mit Rückkanal). Die Busse können somit Einfluss auf die jeweiligen Ampelschaltungen nehmen und Grünphasen anfordern. Im Gegensatz zur existierenden, analogen Funkmeldetechnik zur ÖPNV-Beschleunigung bietet die digitale Technologie weitreichendere Anwendungsmöglichkeiten.

Priorisierung Rettungsfahrzeuge
Vergleichbar mit dem städtischen Anwendungsfall „ÖPNV-Beschleunigung“, wird im außerstädtischen Testfeld die Priorisierung von Rettungsfahrzeugen erprobt. Dazu werden die gleichen speziellen Funkmodule installiert (RSUs mit Rückkanal). Die Rettungsfahrzeuge können somit Einfluss auf die jeweiligen Ampelschaltungen nehmen und Grünphasen anfordern, während gleichzeitig alle anderen Verkehrsströme gesperrt werden, also „Rot“ erhalten. Somit wird das Risiko von Unfällen stark reduziert und die Einsatzfahrer*innen können den Knotenpunkt sorgenfrei überfahren. Auch werden Gehörlose, welche das Martinshorn des Einsatzfahrzeuges nicht wahrnehmen können, durch das rote Signal davon abgehalten den Kreuzungsbereich zu betreten.

Platooning
Ein weiterer Bestandteil des Projektes TEMPUS ist die Untersuchung der Potentiale sowie die Konzeption und Prototypenerstellung von Platooning-Bussen im Öffentlichen Personennahverkehr. Platooning bezeichnet einen Aufbau, bei dem mehrere Fahrzeuge mit Hilfe eines technischen Steuerungssystems (elektronische Deichsel) in sehr geringem Abstand zueinander fahren können. Es wird untersucht, welche technischen Anforderungen bestehen, um Busse sicher, verlässlich und praktikabel in bestimmten Situationen virtuell koppeln zu können. Möglicher Nutzen von Platooning:
- Ersatz für Buszuganhänger mit rein elektrischem Antrieb, da die Busse mit Passagieranhänger aktuell nicht sinnvoll elektrifiziert werden können.
- Durch die Standardisierung der Fahrzeuglängen kann die Infrastruktur auf den Betriebshöfen (z. B. Ladeinfrastruktur) einfacher geplant und günstiger umgesetzt werden.
- Automatisiertes Fahren auf dem Betriebshof ist möglich und der Rangieraufwand kann eingespart werden.
- Eine flexible Fahrgastkapazität hinsichtlich Fahrgastschwankungen auf einer Strecke wird dadurch möglich. Dadurch kann ein bedarfsgerechter Energieverbrauch erreicht werden und eventuell auf der Strecke nachgeladen werden.

Ride-Parcel-Pooling
Mit zunehmender Vernetzung, Datenverfügbarkeit und dem steigenden Trend der Bedarfsverkehre wird eine betriebliche Integration des Personen- und Güterverkehrs möglich. In TEMPUS wird das Ride-Parcel-Pooling (RPP) – eine Bündelung des Personen- und Güterverkehrs – untersucht und eine Abschätzung erzielt, ob und wie die Verkehrssituation damit verbessert werden kann. Vor allem im Hinblick auf Fahrzeuge im Flottenbetrieb verspricht die Kombination der beiden Verkehre einen effizienteren, nachhaltigeren und ressourcenschonenderen Betrieb.

HD-Karte
Für das gesamte TEMPUS-Testfeld wird eine hochgenaue digitale Referenzkarte in OpenDrive-Format erstellt. Diese kann nicht nur in den Fahrzeugen für die Feldversuche und die Erprobung automatisierter Fahrfunktionen genutzt werden, sondern ist auch kompatibel zu den meisten Simulationsanwendungen. Die Größe und Genauigkeit der digitalen HD-Karte in TEMPUS ist einmalig. Sie steht allen Projektpartnern sowie interessierten Unternehmen auf Anfrage zu Verfügung.

Verkehrsmanagementstrategien
Die jährlich steigenden Verkehrsbelastungen erfordern neue Innovationen und moderne Methoden zur aktiven Verkehrssteuerung. Die digitale Erstellung und Kommunikation von kommunalen Verkehrsmanagementstrategien eröffnet die Möglichkeit, auf Basis von Echtzeitverkehrsinformationen, Widerstandszonen bzw. zu bevorzugende Streckenführungen digital festzulegen und diese, zur Routenfindung im Fahrzeug, an die Navigationsdienstleister*innen zu verteilen. Bei planbaren, temporären Ereignissen, wie Großveranstaltungen oder Straßensperrungen (zum Beispiel München Marathon oder Fußballspiele in Fröttmaning), können die Verkehrsmanagementstrategien zur großräumigen Umfahrung bereits im Vorfeld festgelegt und kommuniziert werden. So sollen Stauereignisse frühzeitig vermieden und damit verbundene Emissionen reduziert werden. Die Strategien werden über den nationalen Zugangspunkt, den Mobilitäts Daten Marktplatz (MDM), Dritten zu Verfügung gestellt.

Ampelschaltprognosen
Um den Verkehrsfluss zu verbessern und Emissionen zu reduzieren, werden im Rahmen von TEMPUS schrittweise einzelne Lichtsignalanlagen in einen Ampelphasenassistenten eingebunden. Dieser berechnet, welches Signalbild am nächsten Knotenpunkt voraussichtlich angezeigt wird und erstellt eine Ampelschaltprognose. Ist mit einem grünen Signalbild zu rechnen, wird den Fahrer*innen eine Richtgeschwindigkeit angezeigt, die zur Überfahrt ausreichend ist. Ist mit einem roten Signalbild zu rechnen, werden die Fahrer*innen informiert und können das Fahrverhalten frühzeitig anpassen. Getestet werden die Prognosen sowohl für PKW- als auch Radfahrer*innen an Lichtsignalanlagen im und um das Testfeld.

Dynamisches Tempolimit
Auf vielen Autobahnen werden bereits Wechselverkehrszeichen (WVZ) zur Anzeige einer variablen Geschwindigkeitsbegrenzung eingesetzt. Bei fortschreitender Automatisierung der Fahrzeuge müssen diese Geschwindigkeitsbegrenzungen auch digital an die Fahrzeuge übertragen werden können. Deshalb wird in diesem Anwendungsfall erprobt, wie teilautomatisierte Fahrzeuge die aktuelle Geschwindigkeitsbegrenzung als Obergrenze der automatischen Geschwindigkeitsregelung von den WVZ empfangen und übernehmen können.

Daten Cloud
In TEMPUS werden nicht nur die Kurzstreckenkommunikationstechnologien (ITSG5 und CV2X) getestet, sondern auch die Langstreckenkommunikation über ein Backend, also der Zugriff auf Daten in einer Cloud. In dieser Backend-Lösung, in unserem Fall der Mobilitäts Daten Marktplatz (MDM), liegen verschiedenste Verkehrsdaten. Auch von uns werden hier Daten im Rahmen von TEMPUS veröffentlicht, wie beispielsweise die entwickelten kommunalen Verkehrsmanagementstrategien. Auf diese Daten können auch Dritte über diesen zentralen Zugangspunkt zugreifen.

Drohnen
Der rasante Fortschritt im Bereich unbemannter Flugzeuge (Drohnen), sowie der automatisierten Bildverarbeitung durch maschinelles Lernen ermöglichen neue Optionen für die Verkehrsbeobachtung. Im Rahmen von TEMPUS soll ein vollständiges Bild des Verkehrs mittels Drohnen auf mehreren Straßenzügen erzeugt werden, welches nicht nur die Trajektorien des motorisierten Verkehrs, sondern auch wertvolle Informationen zum Verhalten von Fußgänger*innen und Fahrradfahrer*innen liefert. Dabei wird, verglichen mit aktuell verfügbaren Sensorsystemen, eine sowohl zeitlich als auch räumlich kontinuierlich verfügbare Aufnahme im Messzeitraum möglich.

Akzeptanzforschung
Voraussetzung für die Akzeptanz automatisierter Fahrzeuge im urbanen Raum ist neben der objektiven Verkehrssicherheit (konfliktfreie Interaktion der AVF mit anderen Verkehrsteilnehmenden) auch die subjektive Verkehrssicherheit (der Straßenraum und der Verkehr wird als sicher erlebt). Deshalb werden im Bereich des TEMPUS-Testfelds reale Interaktionsszenarien zwischen automatisierten, vernetzten Fahrzeugen (AVF) und vulnerablen Verkehrsteilnehmenden (VRU) im Stadtverkehr untersucht. Daraus sollen Empfehlungen für die Gestaltung sicherer, effizienter und angenehm wahrgenommener Interaktionen abgeleitet werden. Außerdem werden Personenbefragungen zur Untersuchung der Akzeptanz durchgeführt.

Simulation und Bewertung Gesamtsystem
Die Ziele dieses Hauptthemas lassen sich zwei Kernbereichen zuordnen: Zum einen werden die in den Feldversuchen gewonnenen Erkenntnisse zu verkehrlichen Wirkungen von automatisierten und vernetzten Fahrzeugen (AVF) mit Hilfe von Verkehrsflusssimulationen für verschiedene Szenarien, bis hin zur vollständigen Marktdurchdringung von AVF, untersucht. Zum anderen wird die entwickelte Simulationsumgebung dazu genutzt, innovative Konzepte zur Neuordnung des Straßenraums zu simulieren und dort bestehende Modellierungs- und Verkehrssteuerungsansätze iterativ weiterzuentwickeln. Hierbei liegt der Fokus auf Managed Lanes, fahrstreifenfreiem automatisierten Verkehr sowie einer Minderung von Stauwellen. Die Ergebnisse der erstellten Simulationsszenarien werden aufbereitet und interpretiert. Zusätzlich umfassen die abschließenden Untersuchungen eine kritische Diskussion und Einschätzung der zukünftigen Anwendbarkeit der entwickelten Konzepte.

Gebietskörperschaftsübergreifende Systemarchitektur und Leitfaden
Grundlegendes Ziel ist es, die Erweiterbarkeit der Testfelder auf umliegende Gebietskörperschaften zu untersuchen und übertragbare Empfehlungen für eine Umsetzung zu geben. Für die räumliche und technische Verknüpfung der beiden Testfeldbereiche wird dazu in den Zuständigkeitsbereichen der Landesbaudirektion (München Land) und der Landeshauptstadt München (München Stadt) eine gebietskörperschaftsübergreifende Systemarchitektur zur Verkehrssteuerung und dem Datenaustausch definiert, eingerichtet und getestet. Diese soll die Organisationsstruktur, das Rollenverständnis mit Verantwortlichkeiten und die damit verbundenen Kommunikationsprozesse darstellen. So können die gewonnenen Erkenntnisse für eine etwaige, zukünftige Infrastrukturerweiterung und ‑übertragung genutzt werden. Abschließend werden diese Möglichkeiten in einem praxisorientierten Leitfaden für Kommunen und Aufgabenträger dokumentiert.
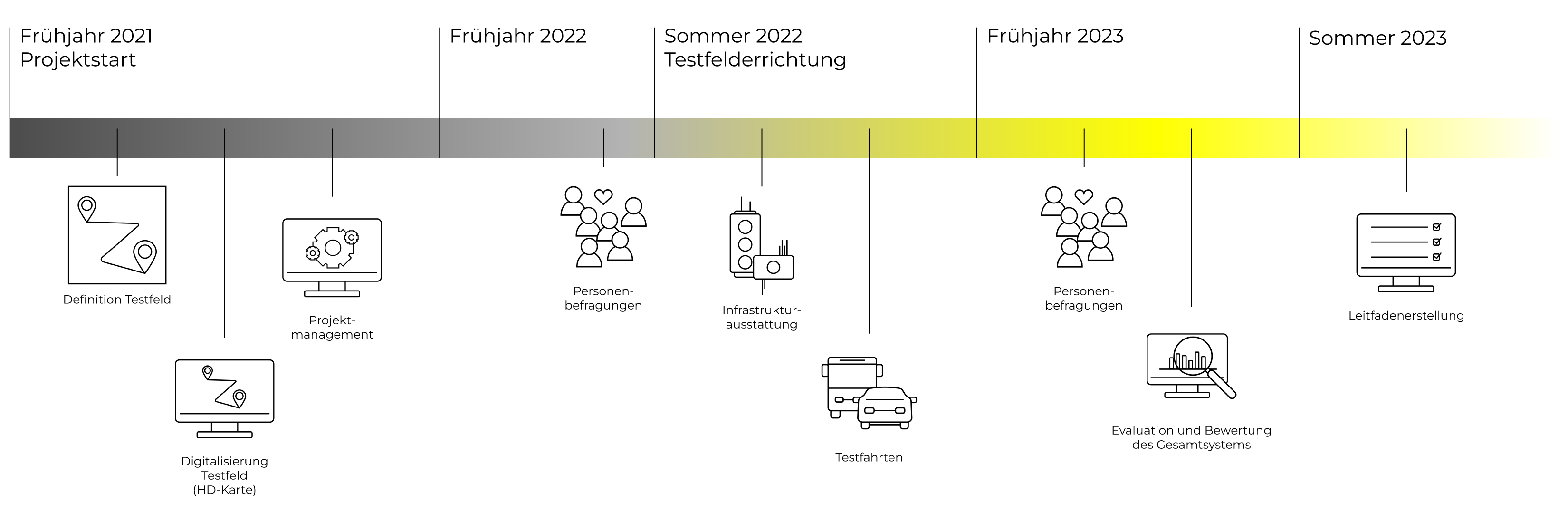
Meilensteine
Vision
VERNETZT.
DIGITAL.
VORAUS.
Münchens Verkehrssystem stößt, wie das der meisten Metropolregionen, an vielen Stellen an seine Grenzen. Mit Hilfe von innovativen Ansätzen im Projekt TEMPUS wollen wir Wege zu einer effizienten und sicheren Abwicklung des Verkehrsaufkommens finden. Wir wollen Erkenntnisse darüber erlangen, wie sich in Zukunft der individuelle und öffentliche Straßenverkehr entwickeln könnte und frühzeitig erfassen, ob und wie Vernetzung und Digitalisierung helfen können, auf dem Weg zu unserer Vision: einem gesamtheitlich nachhaltigen, emissionsarmen und sicheren Verkehrssystem.