

The following illustrations demonstrate some of the main topics and use cases of TEMPUS. Also, learn more about our goals, milestones and vision.
Goals & Vision

Goals

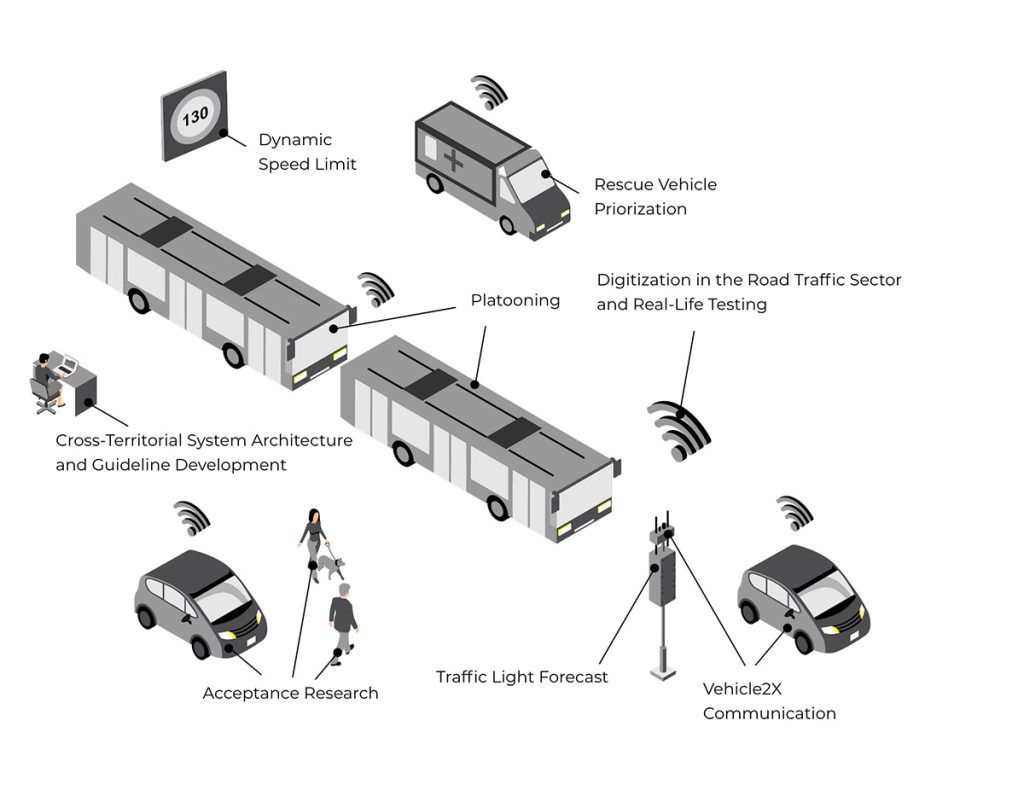
Digitization in the Road Traffic Sector and Real-Life Testing
The realization of automated driving is closely linked to the digitization of road infrastructure and its communication. A main objective of TEMPUS is to test automated and connected driving functions of both individual and public transport in real traffic situations. In the north of Munich, a cross-territorial test field is being defined and equipped with communicating roadside traffic technology. In this way, we want to test innovative technologies in real-life conditions and gain insights into solving technical challenges. For interested citizens, TEMPUS can offer an early insight into the ongoing development of automated and connected driving.

Vehicle2X Communication
In the test field, we are installing Roadside Units (RSUs) at around 65 traffic lights which communicate with onboard units in test vehicles and exchange information about traffic signals and intersections. This enables the complex situation of an intersection to be comprehended by an automated vehicle and allows a safe crossing of the intersection. In contrast to many other projects, our test field tests both Wi-Fi-based ITSG5 and cellular-based CV2X short-range communication technology. This enables us to test a wide range of use cases and prepares us in the best possible way for future developments.

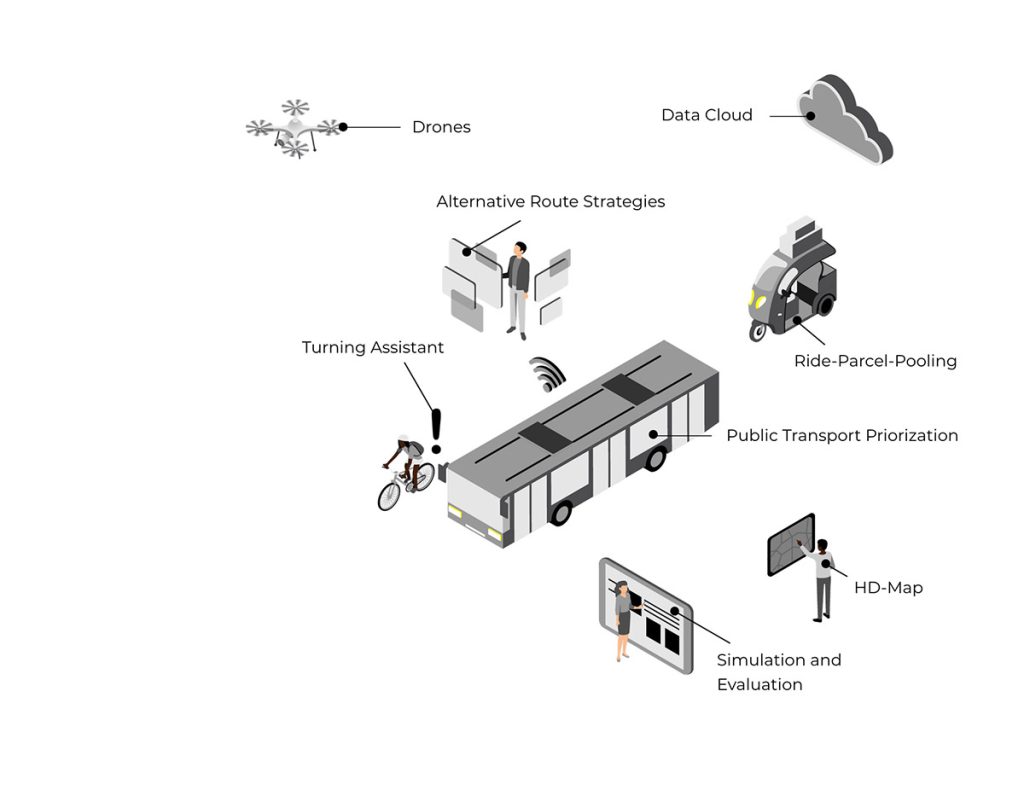
Turning Assistant
For the turning assistant, an intersection is equipped with special camera sensors capable of communicating with vehicles via a roadside unit (RSU). In case of detection of a crossing vulnerable road user, a warning message is issued to which the driver can react in time.
The assistant is being installed at the intersection of Allacher Str./ Wintrichring and is being tested for its reliability and applicability exemplified by buses. Data recorded by the cameras will be converted into anonymized object data consisting of position, speed, direction and type. In this way, no personal data is analyzed and data protection is guaranteed.

Public Transport Priorization
In the urban test field, digital public transport acceleration, i.e. prioritization of scheduled buses, is being tested at three intersections using the bus routes 178 and 180 as an example. Special roadside units are being installed that not only send out information, but can also receive it from vehicles, process it and react to it (RSUs with feedback channel). This enables the buses to control the respective traffic light circuits and request green phases. In contrast to the existing analog radio signaling technology used for public transport acceleration, digital technology offers more advanced application possibilities and real-time data transmission.

Rescue Vehicle Priorization
Comparable to the urban use case “Public Transport Priorization”, the prioritization of emergency vehicles is being tested in the suburban test field. Special Roadside Units can receive information from nearing vehicles, process and react to it (RSUs with feedback channel). The emergency vehicles can thus influence the respective traffic light circuits and request green phases, while the other traffic flows are blocked, i.e. receive “red”. This reduces the risk of accidents and the emergency drivers can cross the intersection without danger. The red signal also keeps deaf people, who cannot hear the emergency vehicle’s siren, from entering the intersection.

Platooning
In this part of the project, we deal with the investigation of the potentials and the prototyping of platooning buses in public transport. Platooning refers to the digital coupling of two automated vehicles. The aim is to investigate the technical requirements for virtually coupling buses safely and reliably in practical situations. Possible benefits of platooning:
- Bus extension with an all-electric engine, since buses with passenger trailers cannot currently be effectively electrified.
- By standardizing the vehicle lengths, the infrastructure at the operating terminal (e.g., charging infrastructure) can be planned more easily and implemented more cost-effectively.
- Automated driving at the operating terminal is possible and the shunting effort can be reduced.
- More flexible passenger capacity with regard to passenger fluctuations on routes. This allows demand-oriented energy consumption to be achieved.

Ride-Parcel-Pooling
With increasing data availability and the growing trend of on-demand transport, an operational integration of passenger and freight transport becomes possible. In TEMPUS, ride-parcel-pooling (i.e., the pooling of passenger and freight transport) is being investigated and an assessment is being made as to whether and how the overall traffic situation could be improved. Especially regarding vehicles in fleet operation, an integration of passenger mobility and logistics could enable a more efficient, sustainable, and resource-saving operation.

HD-Map
A high-definition map in OpenDrive format is created for the entire TEMPUS test field and adjacent roads. The map can not only be used in the vehicles for the field tests but is also compatible with all simulation applications in the project. The size and accuracy of the digital HD map in TEMPUS is unique. It is available to all project partners as well as interested companies upon request.

Alternative Route Strategies
As the traffic load increases annually, new innovations and modern solutions for intelligent traffic management are required. The digital creation and communication of municipal traffic management strategies opens up the possibility of digitally defining resistance zones or preferred routes on the basis of real-time traffic information and distributing these to navigation service providers for route finding in the vehicle. In case of predictable, temporary events (e.g. Munich Marathon or soccer matches in Fröttmaning), traffic management strategies for large-scale detours can be defined and communicated in advance. Thus, congestion events can be avoided at an early stage and related emissions can be reduced. The resulting strategies will be provided to third parties via the national access point, the Mobility Data Marketplace (MDM).

Traffic Light Forecast
In order to improve traffic flow and reduce emissions, individual traffic signal systems are successively being integrated into a traffic light phase assistant. By calculating which signal pattern is likely to be displayed at the next intersection, the system generates a traffic light forecast. If a green signal is predicted, an indicative speed is displayed to the driver, which is adequate for crossing the intersection. If a red signal is expected, the driver is informed and can adapt the driving behavior accordingly. The prognoses are tested for motorists as well as cyclists (based on an application).

Dynamic Speed Limit
On many highways, variable message signs are already used to display a dynamic speed limit. As vehicle automation improves, it has to be possible to transfer these speed limits to the vehicles. Therefore, this use case tests how automated vehicles can receive and adopt the current speed limit from the variable message signs.

Data Cloud
In TEMPUS, not only short-range communication technologies (ITSG5 and CV2X) are tested, but also long-range communication via a backend, meaning access to data in a cloud. This backend solution, in our case the mobility data marketplace (MDM), contains a wide variety of traffic data. We also publish data in this marketplace as part of TEMPUS, as for example the municipal traffic management strategies that have been developed. Third parties can also use this central access point to get these data.

Drones
The rapid progress in the field of unmanned aerial vehicles (drones), as well as automated image processing through machine learning, enable new options for traffic monitoring. Within the framework of TEMPUS, a complete image of traffic is to be generated by means of drones on several streets, which will not only provide the trajectories of motorized traffic, but also valuable information on the behavior of pedestrians and cyclists. Compared to currently available sensor systems, it will be possible to continuously record both temporally and spatially during the measurement period.

Acceptance Research
The broad acceptance of automated vehicles in urban areas is as well based on objective traffic safety (i.e., conflict-free interaction of vehicles with other road users) as on subjective traffic safety (i.e., the road space and traffic are experienced as safe). Real-life interaction scenarios between automated vehicles and vulnerable road users in urban traffic are investigated in the TEMPUS test field. From this, recommendations for the design of safe, efficient, and well perceived interactions will be derived. Representative surveys will be conducted to investigate acceptance.

Simulation and Evaluation
A traffic flow simulation environment will be modeled to investigate the effects of automated driving as well as the above-described use cases on a city-wide scale. Furthermore, the simulation environment is used to simulate innovative concepts for the reorganization of road space, namely manages lanes, automated lane-free traffic as well as a dampening of congestion waves. The results of the created simulation scenarios will be processed and interpreted. Also, the final investigations include a critical discussion and assessment of the future applicability of the developed concepts.

Cross-Territorial System Architecture and Guideline Development
A fundamental objective is to investigate the expandability of the test field to surrounding local authorities and to provide transferable recommendations for implementation. Hence, a cross-territorial system architecture for traffic control and data exchange is being defined, set up and tested in the Bavarian State Construction Directorate (Munich Land) and the City of Munich (Munich City) for the spatial and technical linking of the two responsible areas. This is intended to represent the organizational structure, the understanding of roles and responsibilities and the associated communication processes. Our knowledge gained can be used for any future infrastructure expansion and transfer. A practice-oriented guide documents these options for municipalities and task managers.
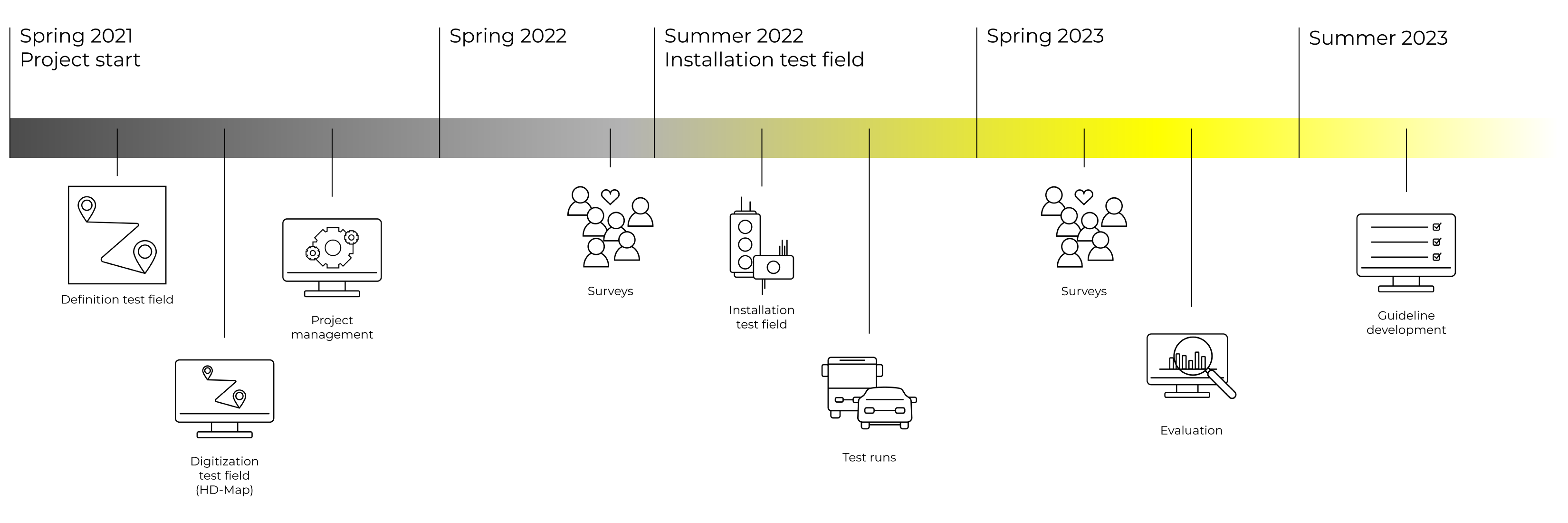
Milestones
Vision
CONNECTED.
DIGITAL.
FORWARD.
Munich’s traffic system, like that of many metropolitan regions, is reaching its limits more and more. New innovative approaches and technologies need to be investigated in order help traffic systems to become safer and more efficient and to enable a satisfying mobility for everyone. Thus, with TEMPUS, we want to contribute: We want to gain insights into how individual and public transport will develop in the future. We want to determine at an early stage whether and how digitization can help us on the way to our vision: a holistically sustainable, low-emission, safe and accessible transportation system.